ROS软件框架概述:节点、通讯、硬件与工具链整合
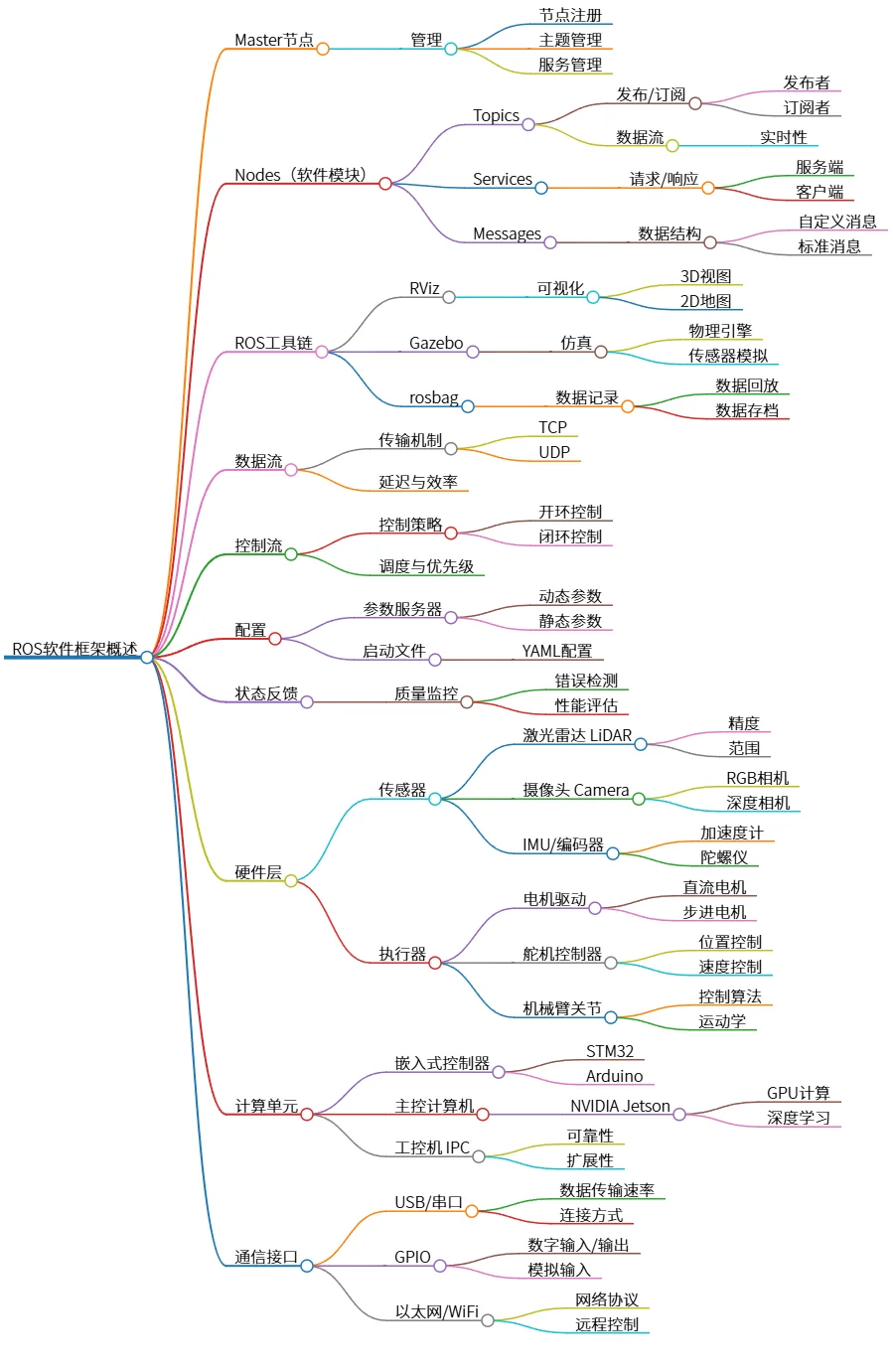
该思维导图概述了ROS软件框架的主要组成部分,包括Master节点的管理功能、软件模块的通信方式(Topics和Services)、数据结构(Messages)、以及工具链(如RViz、Gazebo和rosbag)。此外,展示了数据流、控制流、配置和状态反馈的关键要素,以及硬件层的传感器(如激光雷达和摄像头)和执行器(如电机和机械臂),计算单元的选择(如STM32和NVIDIA Jetson),以及多种通信接口。这些元素共同支撑了ROS系统的高效运行。
源码
# ROS软件框架概述
## Master节点
- 管理
- 节点注册
- 主题管理
- 服务管理
## Nodes(软件模块)
- Topics
- 发布/订阅
- 发布者
- 订阅者
- 数据流
- 实时性
- Services
- 请求/响应
- 服务端
- 客户端
- Messages
- 数据结构
- 自定义消息
- 标准消息
## ROS工具链
- RViz
- 可视化
- 3D视图
- 2D地图
- Gazebo
- 仿真
- 物理引擎
- 传感器模拟
- rosbag
- 数据记录
- 数据回放
- 数据存档
## 数据流
- 传输机制
- TCP
- UDP
- 延迟与效率
## 控制流
- 控制策略
- 开环控制
- 闭环控制
- 调度与优先级
## 配置
- 参数服务器
- 动态参数
- 静态参数
- 启动文件
- YAML配置
## 状态反馈
- 质量监控
- 错误检测
- 性能评估
## 硬件层
### 传感器
- 激光雷达 LiDAR
- 精度
- 范围
- 摄像头 Camera
- RGB相机
- 深度相机
- IMU/编码器
- 加速度计
- 陀螺仪
### 执行器
- 电机驱动
- 直流电机
- 步进电机
- 舵机控制器
- 位置控制
- 速度控制
- 机械臂关节
- 控制算法
- 运动学
## 计算单元
- 嵌入式控制器
- STM32
- Arduino
- 主控计算机
- NVIDIA Jetson
- GPU计算
- 深度学习
- 工控机 IPC
- 可靠性
- 扩展性
## 通信接口
- USB/串口
- 数据传输速率
- 连接方式
- GPIO
- 数字输入/输出
- 模拟输入
- 以太网/WiFi
- 网络协议
- 远程控制
图片