大疆智图航拍数据处理流程与常见问题解决方案
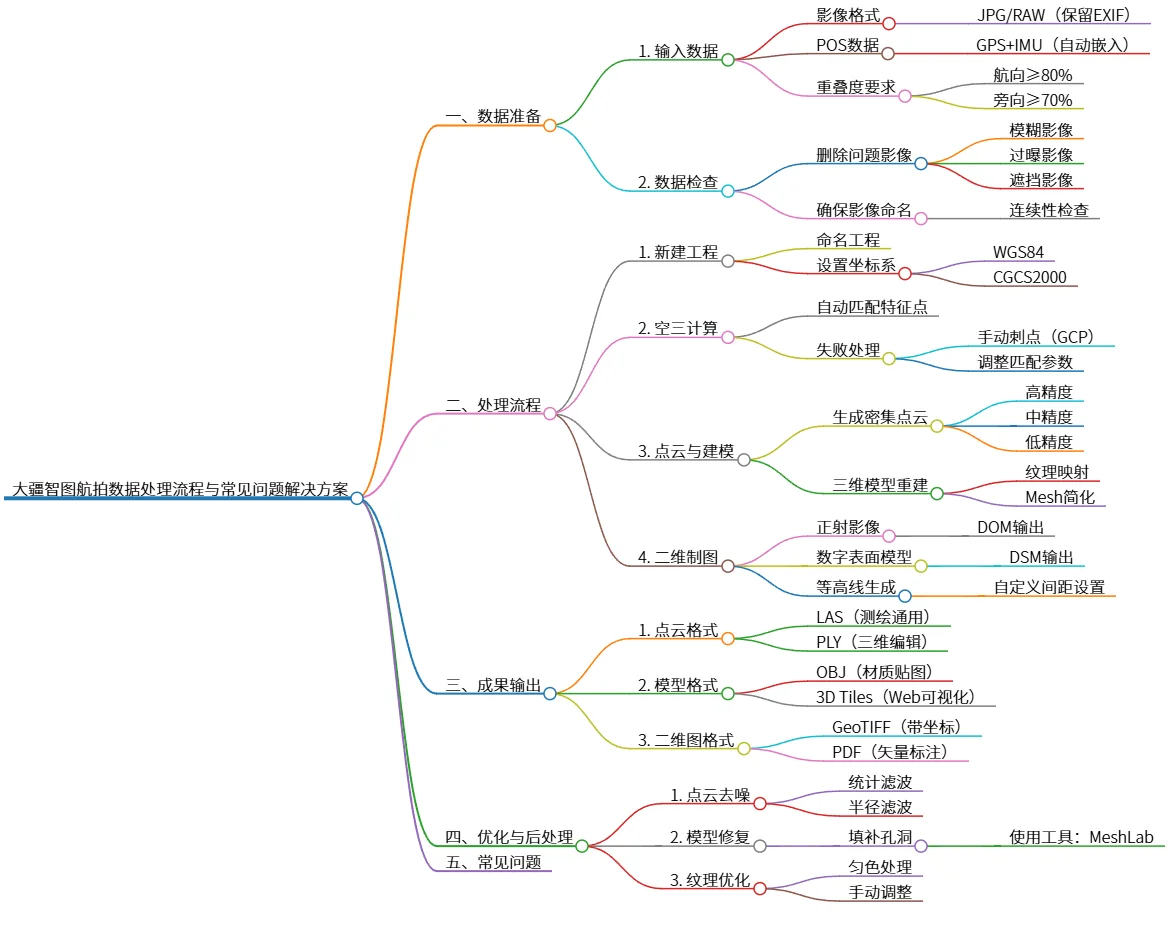
该思维导图展示了大疆智图航拍数据处理的整体流程,包括数据准备、处理、成果输出、优化与后处理,以及常见问题的解决方案。数据准备阶段需确保影像及POS数据完整,处理过程中进行空三计算和三维建模,最终输出点云、模型和二维图。后处理环节侧重于去噪、模型修复和纹理优化,常见问题及其解决方案也一并列出,便于用户参考与应用。
源码
# 大疆智图航拍数据处理流程与常见问题解决方案
## 一、数据准备
### 1. 输入数据
- 影像格式
- JPG/RAW(保留EXIF)
- POS数据
- GPS+IMU(自动嵌入)
- 重叠度要求
- 航向≥80%
- 旁向≥70%
### 2. 数据检查
- 删除问题影像
- 模糊影像
- 过曝影像
- 遮挡影像
- 确保影像命名
- 连续性检查
## 二、处理流程
### 1. 新建工程
- 命名工程
- 设置坐标系
- WGS84
- CGCS2000
### 2. 空三计算
- 自动匹配特征点
- 失败处理
- 手动刺点(GCP)
- 调整匹配参数
### 3. 点云与建模
- 生成密集点云
- 高精度
- 中精度
- 低精度
- 三维模型重建
- 纹理映射
- Mesh简化
### 4. 二维制图
- 正射影像
- DOM输出
- 数字表面模型
- DSM输出
- 等高线生成
- 自定义间距设置
## 三、成果输出
### 1. 点云格式
- LAS(测绘通用)
- PLY(三维编辑)
### 2. 模型格式
- OBJ(材质贴图)
- 3D Tiles(Web可视化)
### 3. 二维图格式
- GeoTIFF(带坐标)
- PDF(矢量标注)
## 四、优化与后处理
### 1. 点云去噪
- 统计滤波
- 半径滤波
### 2. 模型修复
- 填补孔洞
- 使用工具:MeshLab
### 3. 纹理优化
- 匀色处理
- 手动调整
## 五、常见问题
| 问题 | 原因 | 解决方案 |
|______________|_____________________|_________________________|
| 空三失败 | 影像重叠不足/模糊 | 补拍或删除问题影像 |
| 模型纹理错乱 | 光线变化/反光 | 启用匀色或手动调整 |
| 点云空洞 | 水面/玻璃反光 | 手动补点或LiDAR融合 |
图片