视觉定位方法分类与各自技术路线及局限性解析
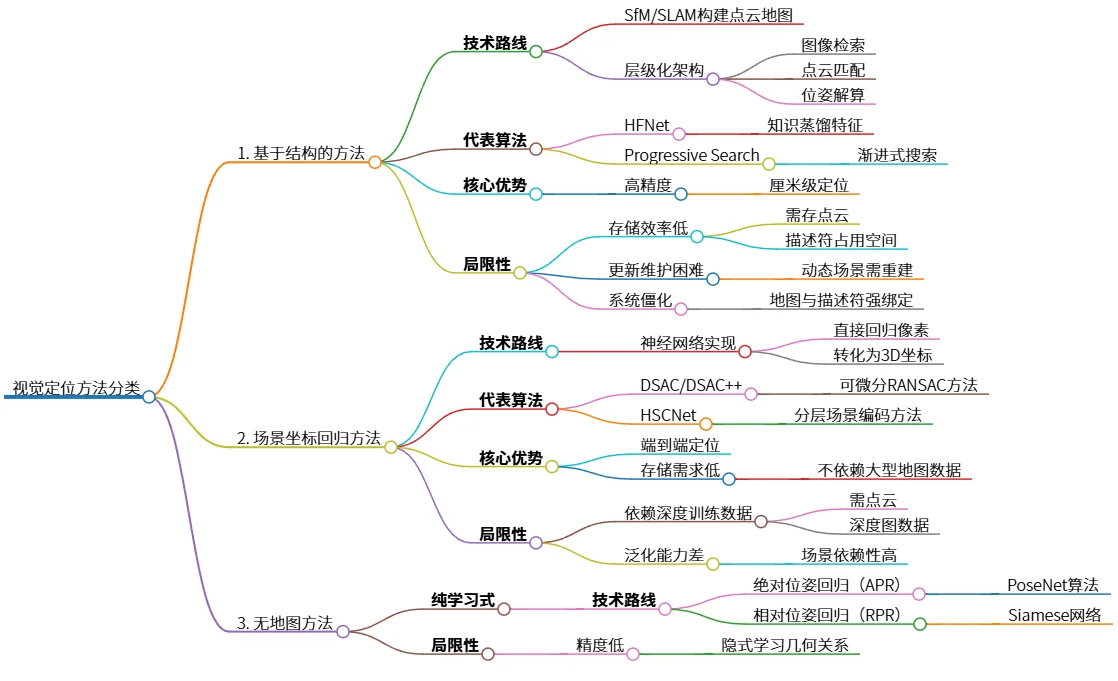
该思维导图对视觉定位方法进行了分类,主要包括三类:基于结构的方法、场景坐标回归方法和无地图方法。基于结构的方法依赖点云地图,具备高精度但局限于存储效率和更新维护;场景坐标回归方法通过神经网络实现端到端定位,存储需求低,但依赖深度训练数据;无地图方法则涵盖绝对和相对位姿回归,但精度较低,依赖隐式学习几何关系。
源码
# 视觉定位方法分类
## 1. 基于结构的方法
- **技术路线**
- SfM/SLAM构建点云地图
- 层级化架构
- 图像检索
- 点云匹配
- 位姿解算
- **代表算法**
- HFNet
- 知识蒸馏特征
- Progressive Search
- 渐进式搜索
- **核心优势**
- 高精度
- 厘米级定位
- **局限性**
- 存储效率低
- 需存点云
- 描述符占用空间
- 更新维护困难
- 动态场景需重建
- 系统僵化
- 地图与描述符强绑定
## 2. 场景坐标回归方法
- **技术路线**
- 神经网络实现
- 直接回归像素
- 转化为3D坐标
- **代表算法**
- DSAC/DSAC++
- 可微分RANSAC方法
- HSCNet
- 分层场景编码方法
- **核心优势**
- 端到端定位
- 存储需求低
- 不依赖大型地图数据
- **局限性**
- 依赖深度训练数据
- 需点云
- 深度图数据
- 泛化能力差
- 场景依赖性高
## 3. 无地图方法
- **纯学习式**
- **技术路线**
- 绝对位姿回归(APR)
- PoseNet算法
- 相对位姿回归(RPR)
- Siamese网络
- **局限性**
- 精度低
- 隐式学习几何关系
图片