控制测量概述与导线测量方法解析与应用
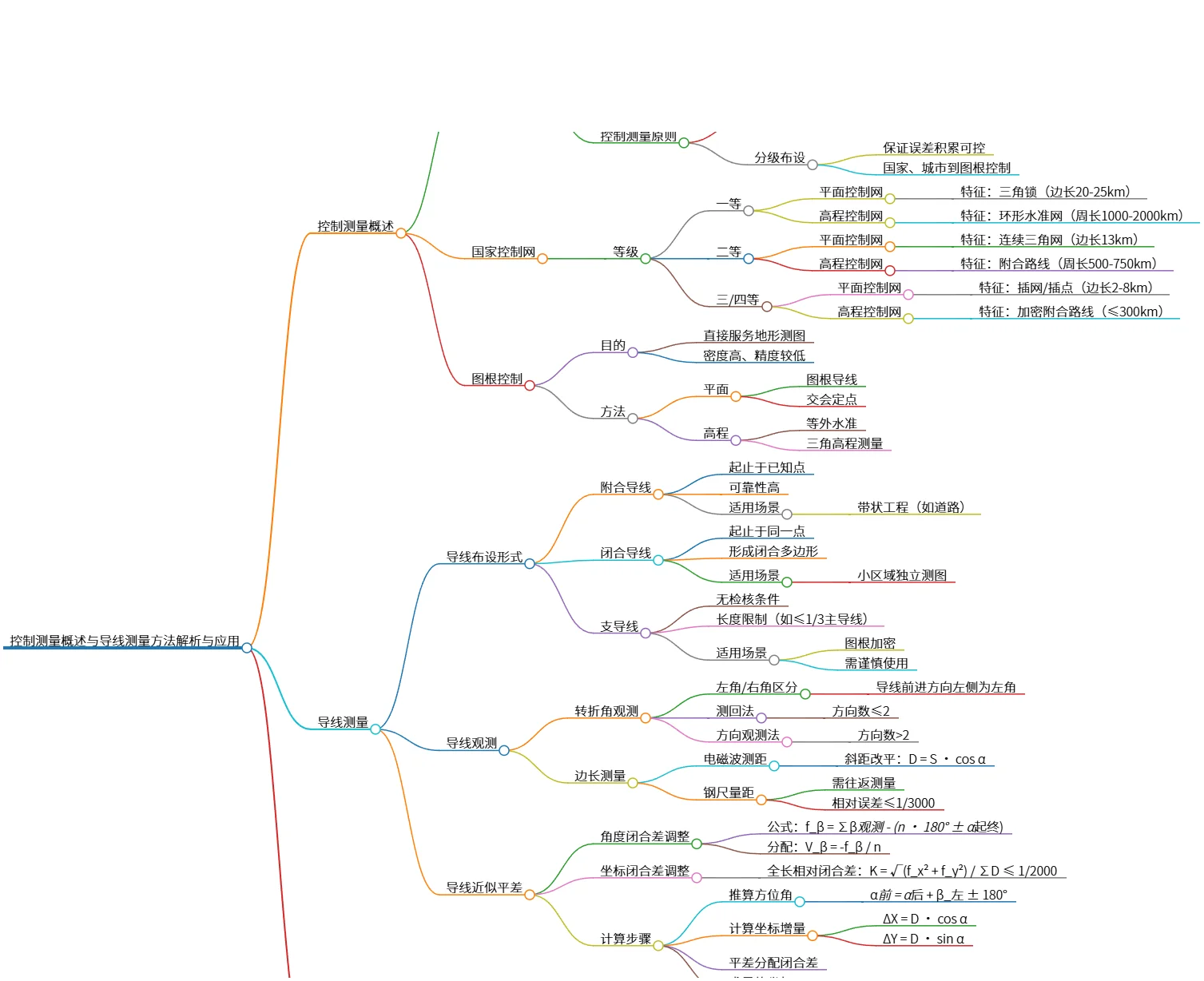
该思维导图概述了控制测量的基本概念,包括控制点、控制网及其原则,国家控制网的等级和特征,以及图根控制的目的和方法。此外,介绍了导线测量的布设形式、观测方法及其近似平差步骤;最后,讲解了交会测量,特别是前方交会的原理和公式,强调了坐标差的检核方式。此信息为地形测绘提供了关键的理论和实际指导。
源码
# 控制测量概述与导线测量方法解析与应用
- 控制测量概述
- 基本概念
- 控制点
- 特征:精确坐标和高程的固定点
- 控制网
- 类型
- 平面网
- 高程网
- 构成:由控制点构成的几何图形
- 控制测量原则
- 由整体到局部
- 先布设高等级控制网
- 逐级加密
- 分级布设
- 保证误差积累可控
- 国家、城市到图根控制
- 国家控制网
- 等级
- 一等
- 平面控制网
- 特征:三角锁(边长20-25km)
- 高程控制网
- 特征:环形水准网(周长1000-2000km)
- 二等
- 平面控制网
- 特征:连续三角网(边长13km)
- 高程控制网
- 特征:附合路线(周长500-750km)
- 三/四等
- 平面控制网
- 特征:插网/插点(边长2-8km)
- 高程控制网
- 特征:加密附合路线(≤300km)
- 图根控制
- 目的
- 直接服务地形测图
- 密度高、精度较低
- 方法
- 平面
- 图根导线
- 交会定点
- 高程
- 等外水准
- 三角高程测量
- 导线测量
- 导线布设形式
- 附合导线
- 起止于已知点
- 可靠性高
- 适用场景
- 带状工程(如道路)
- 闭合导线
- 起止于同一点
- 形成闭合多边形
- 适用场景
- 小区域独立测图
- 支导线
- 无检核条件
- 长度限制(如≤1/3主导线)
- 适用场景
- 图根加密
- 需谨慎使用
- 导线观测
- 转折角观测
- 左角/右角区分
- 导线前进方向左侧为左角
- 测回法
- 方向数≤2
- 方向观测法
- 方向数>2
- 边长测量
- 电磁波测距
- 斜距改平:D = S · cos α
- 钢尺量距
- 需往返测量
- 相对误差≤1/3000
- 导线近似平差
- 角度闭合差调整
- 公式:f_β = ∑β_观测 - (n · 180° ± α_起终)
- 分配:V_β = -f_β / n
- 坐标闭合差调整
- 全长相对闭合差:K = √(f_x² + f_y²) / ∑D ≤ 1/2000
- 计算步骤
- 推算方位角
- α_前 = α_后 + β_左 ± 180°
- 计算坐标增量
- ΔX = D · cos α
- ΔY = D · sin α
- 平差分配闭合差
- 求最终坐标
- 交会测量
- 前方交会
- 原理
- 在已知点A、B观测角α、β
- 计算待定点P坐标
- 公式
- X_P = (X_A · cot β + X_B · cot α + (Y_B - Y_A)) / (cot α + cot β)
- Y_P = (Y_A · cot β + Y_B · cot α - (X_B - X_A)) / (cot α + cot β)
- 检核
- 两组交会
图片