工业机器人硬件组成及其各部分详解与功能
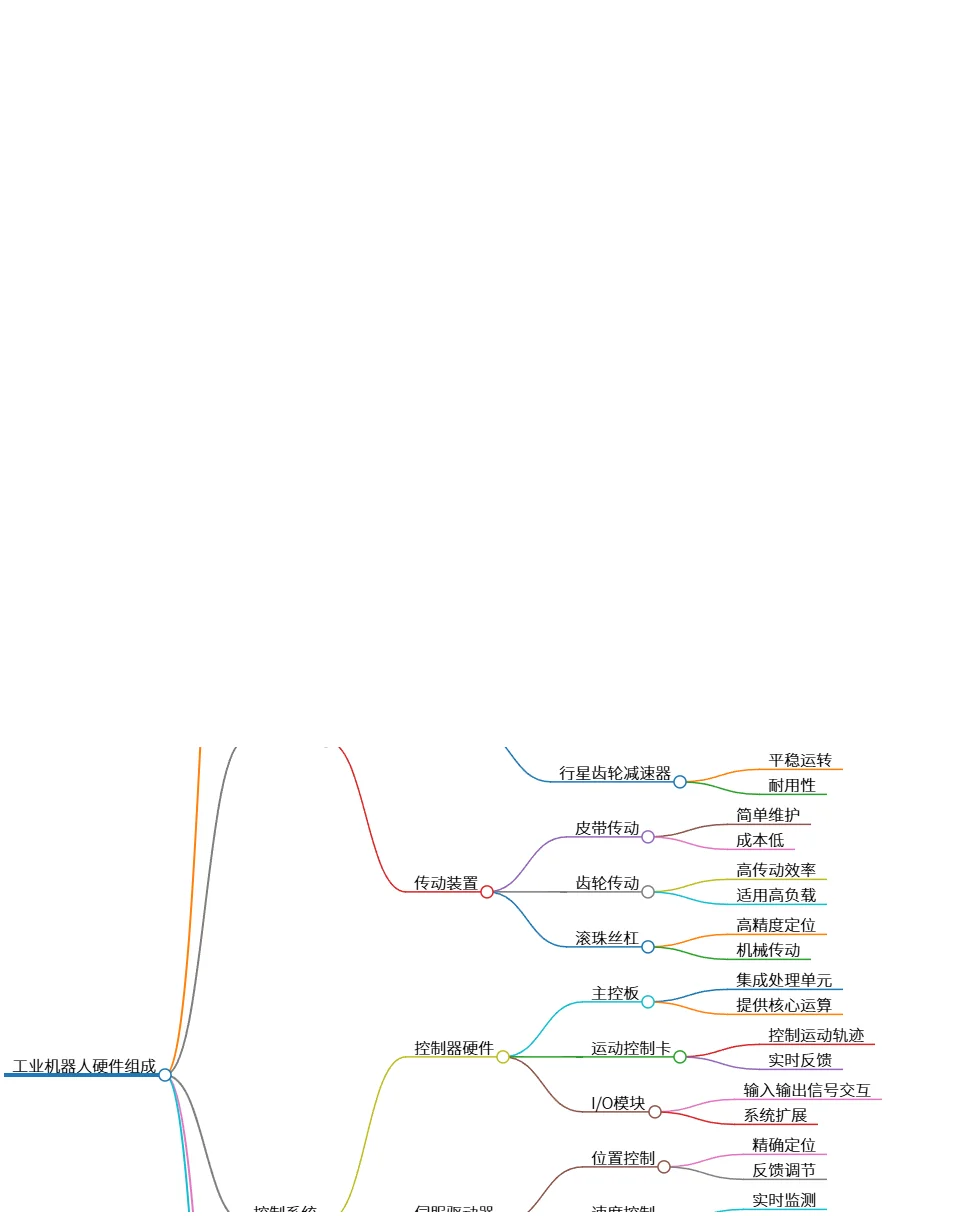
该思维导图详细介绍了工业机器人硬件的组成,包括机械结构、驱动系统、控制系统、传感系统、电源系统、安全系统和外设接口。机械结构主要包括基座、机械臂和末端执行器;驱动系统涉及伺服电机、减速器和传动装置;控制系统由控制器硬件、伺服驱动器和传感器接口构成。传感系统包括位置传感器、力/力矩传感器及环境传感器。电源系统提供主电源和备用电源,安全系统确保操作安全,外设接口支持通信和人机交互。
源码
# 工业机器人硬件组成
- 机械结构
- 基座
- 固定机器人主体
- 提供稳定性
- 安装支撑装置
- 机械臂
- 连杆
- 链接各个关节
- 传递运动
- 关节
- 旋转关节
- 提供自由度
- 平移关节
- 线性运动
- 腕部
- 末端执行器接口
- 角度调整功能
- 末端执行器
- 夹爪/夹具
- 机械抓取
- 适用各种工件形状
- 焊枪
- 焊接操作
- 温度控制
- 喷枪
- 喷涂液体
- 精确度控制
- 真空吸盘
- 吸附平面物体
- 适合车间环境
- 专用工具
- 针对具体任务设计
- 定制化
- 驱动系统
- 伺服电机
- 交流伺服电机
- 高效能
- 响应快速
- 直流伺服电机
- 简单控制
- 稳定性
- 减速器
- 谐波减速器
- 高精度
- 紧凑设计
- RV减速器
- 高负载能力
- 低背隙
- 行星齿轮减速器
- 平稳运转
- 耐用性
- 传动装置
- 皮带传动
- 简单维护
- 成本低
- 齿轮传动
- 高传动效率
- 适用高负载
- 滚珠丝杠
- 高精度定位
- 机械传动
- 控制系统
- 控制器硬件
- 主控板
- 集成处理单元
- 提供核心运算
- 运动控制卡
- 控制运动轨迹
- 实时反馈
- I/O模块
- 输入输出信号交互
- 系统扩展
- 伺服驱动器
- 位置控制
- 精确定位
- 反馈调节
- 速度控制
- 实时监测
- 动态调节
- 扭矩控制
- 适应不同负载
- 保护机制
- 传感器接口
- 编码器接口
- 反馈位置信息
- 提高准确性
- 力/力矩传感器接口
- 实时监控力的变化
- 安全保护
- 视觉系统接口
- 图像处理
- 提供环境信息
- 传感系统
- 位置传感器
- 绝对编码器
- 精准位置反馈
- 增量编码器
- 高速响应
- 解析器
- 提供角度信息
- 力/力矩传感器
- 六维力传感器
- 力的全面监控
- 一维力传感器
- 简单测量
- 环境传感器
- 接近开关
- 物体检测
- 环境感知
- 视觉系统
- 物体识别
- 智能辅助
- 安全光幕
- 防止碰撞
- 保护操作人员
- 其他传感器
- 温度传感器
- 工作环境监控
- 振动传感器
- 设备健康监测
- 电流传感器
- 能耗监测
- 电源系统
- 主电源
- AC/DC转化
- 供电稳定性
- 配电单元
- 保障各组件供电
- 备用电源
- 紧急停止电源
- 保障安全
图片