CAN/LIN通信总线发展与应用分析总结
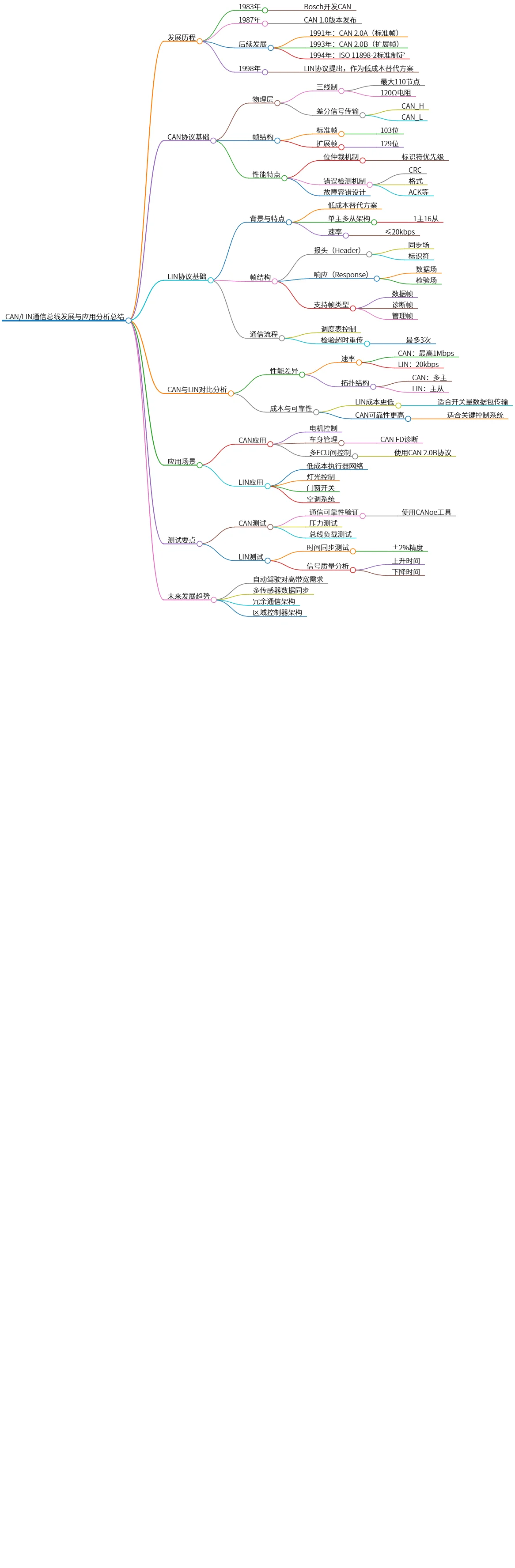
该思维导图概述了CAN和LIN通信总线的发展历程、协议基础、对比分析、应用场景、测试要点及未来发展趋势。CAN协议始于1983年,具有高性能和可靠性,适用于关键控制系统;而LIN协议为低成本替代方案,适合开关量数据传输。两者的速率、拓扑结构和成本差异明显。未来,随着自动驾驶和多传感器数据需求增长,通信架构将向更高带宽和冗余设计发展。
源码
# CAN/LIN通信总线发展与应用分析总结
## 发展历程
- 1983年
- Bosch开发CAN
- 1987年
- CAN 1.0版本发布
- 后续发展
- 1991年:CAN 2.0A(标准帧)
- 1993年:CAN 2.0B(扩展帧)
- 1994年:ISO 11898-2标准制定
- 1998年
- LIN协议提出,作为低成本替代方案
## CAN协议基础
- 物理层
- 三线制
- 最大110节点
- 120Ω电阻
- 差分信号传输
- CAN_H
- CAN_L
- 帧结构
- 标准帧
- 103位
- 扩展帧
- 129位
- 性能特点
- 位仲裁机制
- 标识符优先级
- 错误检测机制
- CRC
- 格式
- ACK等
- 故障容错设计
## LIN协议基础
- 背景与特点
- 低成本替代方案
- 单主多从架构
- 1主16从
- 速率
- ≤20kbps
- 帧结构
- 报头(Header)
- 同步场
- 标识符
- 响应(Response)
- 数据场
- 检验场
- 支持帧类型
- 数据帧
- 诊断帧
- 管理帧
- 通信流程
- 调度表控制
- 检验超时重传
- 最多3次
## CAN与LIN对比分析
- 性能差异
- 速率
- CAN:最高1Mbps
- LIN:20kbps
- 拓扑结构
- CAN:多主
- LIN:主从
- 成本与可靠性
- LIN成本更低
- 适合开关量数据包传输
- CAN可靠性更高
- 适合关键控制系统
## 应用场景
- CAN应用
- 电机控制
- 车身管理
- CAN FD诊断
- 多ECU间控制
- 使用CAN 2.0B协议
- LIN应用
- 低成本执行器网络
- 灯光控制
- 门窗开关
- 空调系统
## 测试要点
- CAN测试
- 通信可靠性验证
- 使用CANoe工具
- 压力测试
- 总线负载测试
- LIN测试
- 时间同步测试
- ±2%精度
- 信号质量分析
- 上升时间
- 下降时间
## 未来发展趋势
- 自动驾驶对高带宽需求
- 多传感器数据同步
- 冗余通信架构
- 区域控制器架构
图片