基于无人集群点云数据的高效自动化三维建模
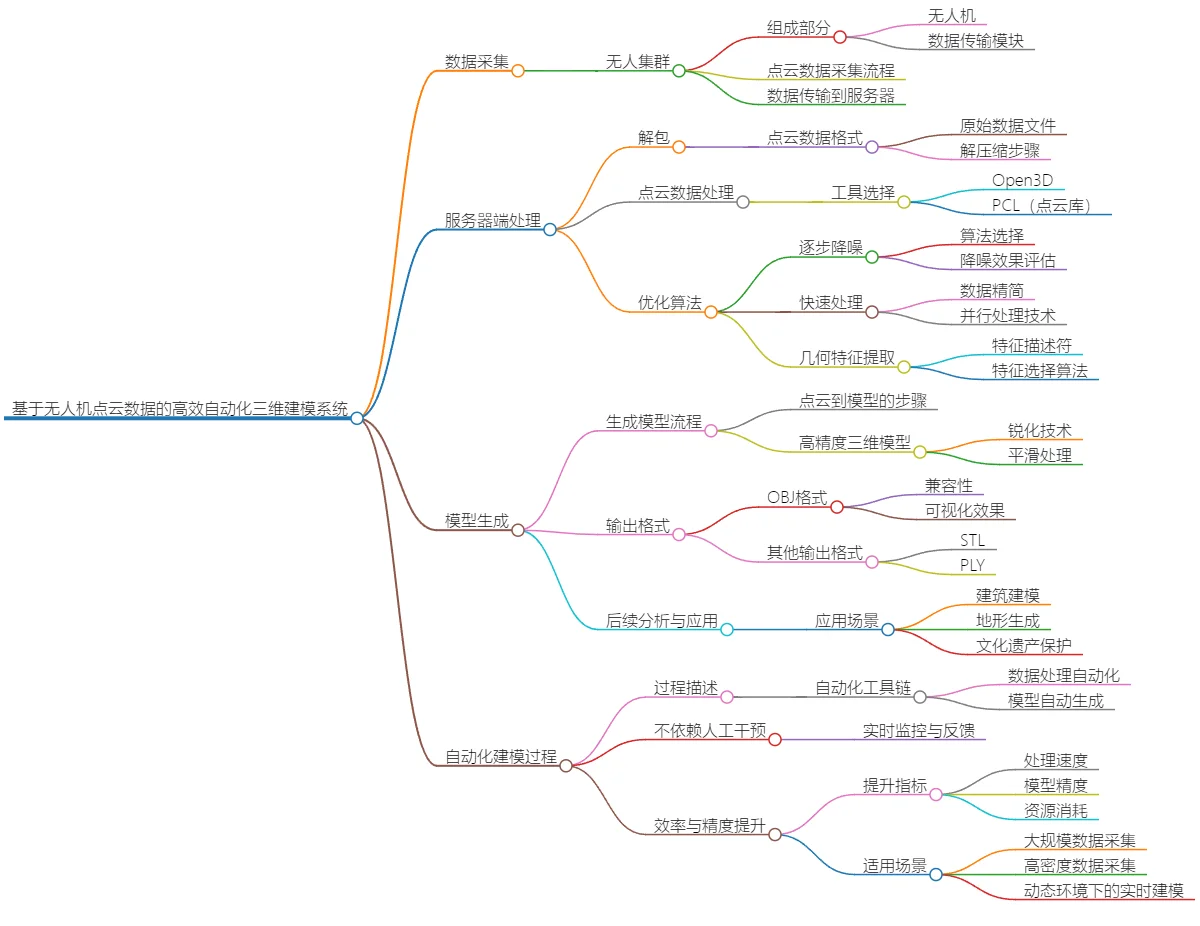
该思维导图阐述了一个自动化三维建模流程。系统从无人集群采集点云数据,服务器端使用Open3D进行高效的点云数据解包和处理,包括快速处理、几何特征提取等优化算法。最终生成高精度三维模型,并以OBJ格式输出,方便后续分析与应用。整个过程自动化,无需人工干预,显著提升效率和精度,尤其适用于大规模、高密度的数据采集场景。
源码
# 基于无人机点云数据的高效自动化三维建模系统
## 数据采集
### 无人集群
#### 组成部分
##### 无人机
##### 数据传输模块
#### 点云数据采集流程
#### 数据传输到服务器
## 服务器端处理
### 解包
#### 点云数据格式
##### 原始数据文件
##### 解压缩步骤
### 点云数据处理
#### 工具选择
##### Open3D
##### PCL(点云库)
### 优化算法
#### 逐步降噪
##### 算法选择
##### 降噪效果评估
#### 快速处理
##### 数据精简
##### 并行处理技术
#### 几何特征提取
##### 特征描述符
##### 特征选择算法
## 模型生成
### 生成模型流程
#### 点云到模型的步骤
#### 高精度三维模型
##### 锐化技术
##### 平滑处理
### 输出格式
#### OBJ格式
##### 兼容性
##### 可视化效果
#### 其他输出格式
##### STL
##### PLY
### 后续分析与应用
#### 应用场景
##### 建筑建模
##### 地形生成
##### 文化遗产保护
## 自动化建模过程
### 过程描述
#### 自动化工具链
##### 数据处理自动化
##### 模型自动生成
### 不依赖人工干预
#### 实时监控与反馈
### 效率与精度提升
#### 提升指标
##### 处理速度
##### 模型精度
##### 资源消耗
#### 适用场景
##### 大规模数据采集
##### 高密度数据采集
##### 动态环境下的实时建模
图片